Манипулятор взаимодействует с конвейером для разборки и сборки тележек при ремонте, автоматизирова но позиционируя своё исходное положение относительно положения тележки на конвейере и фиксируя положение клиньев. После позиционирования, автоматически включается рабочий орган по последовательному захвату и извлечению семи пар пружин и укладки их в места, определённые организацией технологического процесса ремонта тележек. После снятия пружин, извлекаются клинья и укладываются в определённом организационной формой процесса, месте.
Установка комплекта пружин производится на рабочем месте сборки тележек, оснащённом вторым манипулятором, в обратном технологическом порядке.
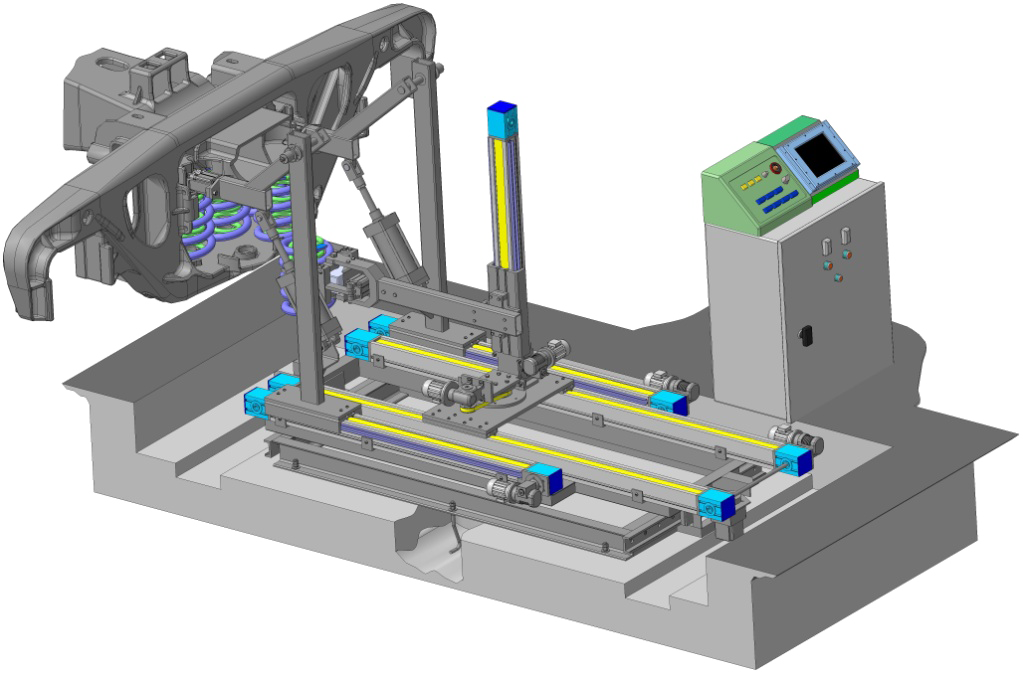
В состав манипулятора входят:
- механизмы позиционирования и перемещения рабочего органа по захвату пар пружин;
- системы датчиков;
- системы распознавания положения;
- системы компьютерного управления.
Технологические возможности манипулятора обеспечивают ежесменный учёт произведенных работ.
{kind=link}